お客様の声 宇宙航空研究開発機構(JAXA) 様
世界初! 宇宙飛行士のタスクを減らす船内ドローンが誕生。日本実験棟「きぼう」の中を自律飛行できる秘訣とは?
日本の航空宇宙開発を担うJAXAは、このたび国際宇宙ステーションの施設の一つである日本実験棟「きぼう」内を撮影する船内ドローン「Int-Ball(イントボール)」の開発に成功しました。すでに初期検証を行っており、2017年12月に国際宇宙ステーションに着任予定の金井宣茂宇宙飛行士は、日本人で初めてこの「Int-Ball」と一緒に作業することになります。
「Int-Ball」を動かすメカ“超小型三軸姿勢制御モジュール”の開発者・茂渡さんとロボティクス担当の谷嶋さんに、基板を使った開発秘話や今後の展望などについてお伺いしました。

日本が誇る筑波宇宙センターとH‐Ⅱロケットの実機
JAXAの研究開発部門とはどんなところですか?
茂渡さん JAXAの中には、有人宇宙技術部門、航空技術部門など合わせて7つの部門等があります。人工衛星やロケット、国際宇宙ステーション(以下ISS)などのプロジェクトに関わる部門が多いですが、研究開発部門では基盤的な研究開発、あるいは少し先を見越したテーマについて研究を行っています。将来使われるよりよい機材のための研究開発とも言えるかもしれません。
私は研究開発部門第一研究ユニットで、姿勢制御機器を担当しています。今回は、Int-Ballを動かすメカ「超小型三軸姿勢制御モジュール」の電気回路部分を担当しました。
谷嶋さん 私は研究開発部門第二研究ユニットで、ロボティクスを担当しています。姿勢制御系の研究とは近い存在で、Int-Ballでは「超小型三軸姿勢制御モジュール」の機械周りを担当しました。
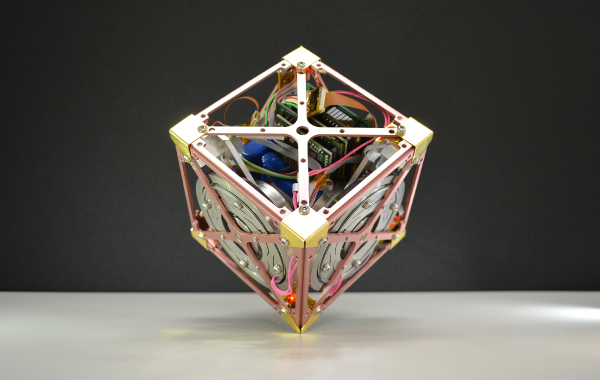
研究開発部門で取り組んでいる、小型姿勢制御モジュール(C)JAXA
お二人が開発に関わられた「Int-Ball(イントボール)」について教えてください。
茂渡さん 正式には「JEM Internal Ball Camera」といいます。「きぼう」船内を遠隔操作や自動制御によって自律飛行し、撮影タスクに追われる宇宙飛行士に代わって、対象物の撮影を行います。宇宙飛行士の作業を支援するロボットというコンセプトとしては、世界初の船内ドローンです。

映像撮影中の「JEM自律移動型船内カメラ(Int-Ball)」 (C)JAXA/NASA
今年(2017年)3月に完成し、6月にロケットと共に打ち上げられ、ISS「きぼう」日本実験棟にて無事取り出されました。6月から初期検証を開始しました。JAXAの有人宇宙技術部門から私たちの部門に話が来て、Int-Ballの開発がスタートしてからわずか1年弱でリリースできたことをとても嬉しく思っています。
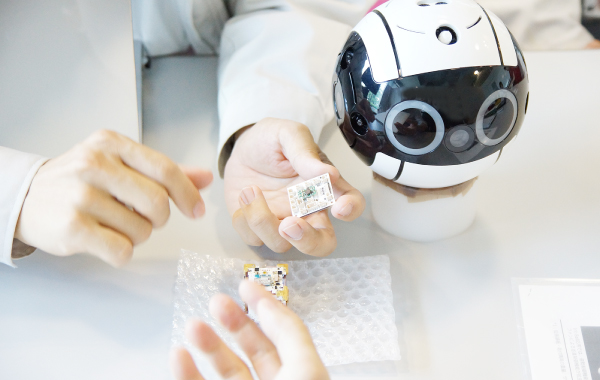
谷嶋さん これが、宇宙で使われているものとほぼ変わらない「Int-Ballエンジニアリングモデル」です。筐体と内部構造は3Dプリントで製造しています。キャラクターの顔のようなかわいいデザインですが、実は鼻部分がメインカメラです。目は中のシステムが動いているかどうかを見せるためのインジケーターの役割をしています。
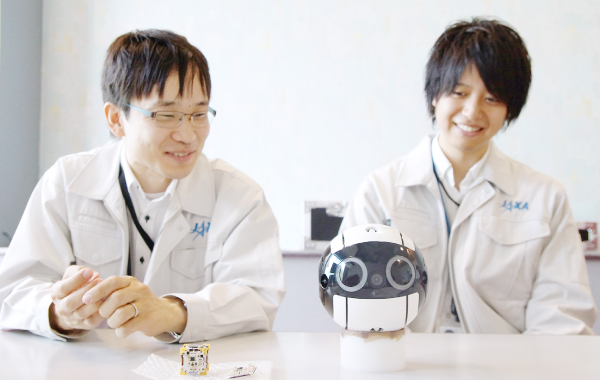
構成も重さも、宇宙で活躍中の現物と同じエンジニアリングモデル
7月にInt-Ballの動く様子がインターネット動画で初公開されたのですが、我々が想像していた以上に良い反響が得られました。海外からの反響もすごかったです。Int-Ballの直径はわずか15cm、重量もたった1㎏です。「これだけ小さくて軽いものができたとは!」という感想をいただけたことが特に嬉しかったですね。
2017年7月に初公開された、きぼう船内ドローン「Int-Ball」の映像(JAXA YouTubeより)
Int-Ballはどのようにして自律飛行ができるのですか?
茂渡さん まず、姿勢制御に必要なジャイロセンサやリアクションホイール等を一つにパッケージ化した「姿勢制御モジュール」が必要です。ただ、モジュールだけでは姿勢制御しかできません。そこで、重要な役割をしているのが、姿勢制御モジュールに付いているファンです。
実は、「きぼう」の中は地上と同じように空気があります。ファンでその空気を吹くことで進むという仕組みです。縦横の動きと回転を含めて、全方向に進めます。地上のドローンなら大きな羽やモーターが必要なところ、小さなファンで並進移動できるのは無重力空間ならではですね。

「風を逆方向に吹くと元の場所に戻ってくるんですよ」(茂渡さん)
どうやって操作しているのですか?
茂渡さん 地上と「きぼう」にはデータ通信回線がありますので、その回線を経由して地上からコマンドを送って操作しています。基本的には、地上から送るのは「右へ何mm動け」、「回転しろ」などの指令だけです。「きぼう」の中ではこのInt-Ball自身が中で計算して、姿勢制御しています。宇宙飛行士が手で動かして「ここへ」と指示できるモードも作っています。今は実験段階ですが、ゆくゆくはそういうこともできるようになる予定です。

運用管制室にて金井宇宙飛行士とInt-Ball開発チーム、運用管制チーム(C)JAXA
無重力空間で自ら姿勢や位置をどのようにして認識しているのですか?
茂渡さん 2つの方法がありまして、1つは慣性センサー(ジャイロセンサーや加速度センサーなど)です。ジャイロセンサーで角速度を検出し積分すると「自分がいまどっちを向いているか」という姿勢がわかります。また、加速度センサーの検出する加速度を積分すると、今の位置が分かります。ただ、それだけだと中に入っているセンサーの精度がよくないものもあり、だんだんと自分の姿勢や位置がドリフトしてしまいます。
そのズレを修正するために、2つめの方法としてカメラを使って、位置と姿勢を検出しています。人工衛星の場合は太陽や星を見て、自分がどっちの方向を向いているのかを知るセンサーがあります。太陽センサー、スターセンサーという呼び方をしているものです。今回のような「きぼう」の中だと太陽や星が見えないので、中に「ターゲットマーカー」というものを設置しています。そのマーカーとの相対位置姿勢をカメラで見て認識して(基準として)、「きぼう」内部での自分の位置と姿勢を認識検出するようにしています。
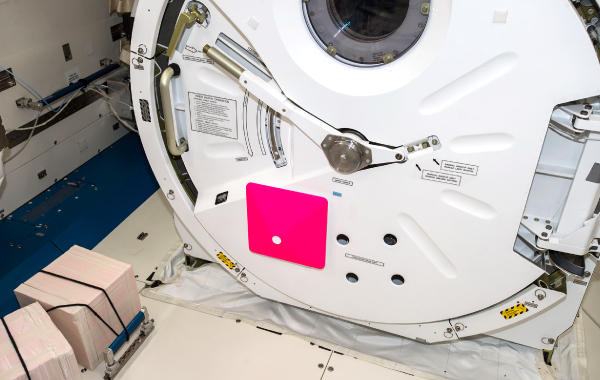
このピンクの立体マーカーと内蔵カメラで位置をナビゲート(C)JAXA/NASA
この2つのセンサーをうまく組み合わせることで、今の位置を検出しています。最近はスマホ用など小型で安価なセンサーが大量に出てくるようになったので、このような小型のモジュールの中に組み込むことができるようになりました。
「超小型」モジュールとありますが、もっと大きいものもあるのですか?
茂渡さん 制御する人工衛星のサイズにもよります。大きな衛星の中にもモーターとコマのような機械(リアクションホイール)が入っていて姿勢制御しているのですが、何トンもあるような大きな衛星になると直径40cm近い大きなホイールが使われています。
最近は、10㎤(立方センチメートル)ほどの小型人工衛星が増えてきました。人工衛星の小型化や低コスト化を実現するためには、姿勢制御に必要な装置も「小さく軽いもの」が不可欠です。そこで、X軸、Y軸、Z軸の3方向ともひとつの装置で制御できる「超小型三軸姿勢制御モジュール」の研究開発が始まったわけです。
最初は1辺150mmのモジュールを作成しましたが、Int-Ballの中に搭載するために工夫を重ね、さらに小さな1辺31mmというモジュールが実現できました。
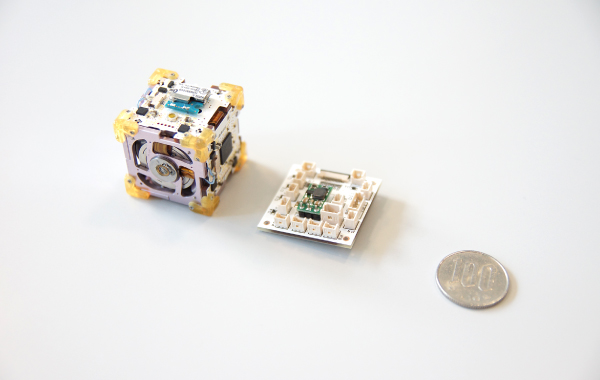
百円玉強の小さな基板には工夫がいっぱい
基板設計にはどんな工夫がありましたか?
茂渡さん 姿勢制御モジュールをInt-Ballに組み込むにあたっては、姿勢制御モジュールに追加で推進用のファンを付けることがミッションでした。そこで、モジュールの基板にぴったり合わせた1辺32mmの拡張基板にコネクタを設け、そのコネクタからファンに接続させました。この拡張基板をP板.comに製造依頼しました。
下の基板と上の基板は、最後にネジで固定するのですが、この時にコネクタに余計な力がかかってしまって接触不良を起こす問題がありました。力がかからないよう位置を合わせてはめるのは難しかったですね。また、拡張基板は、ただファンを接続するという機能だけでなく、Int-Ballのシステムとの通信・電源のインターフェースの機能もあります。小さな基板の中にすべてを詰め込むのが大変で、安定した動作をするまでに試行錯誤がありました。
「この3cm強の小さな基板をぴったりと合わせるのが大変でした」(茂渡さん)
立方体のモジュールの基板はあまりにも小さいので、基板を展開図のように作ってそこに配線し、また組み立てるという方法を取りました。コネクタがあると立体的に組み立てる作業が難しく、また、衝撃等で外れてしまう恐れがあったために、コネクタはできるだけ使わずバチッと合致させることにこだわりました。
制約があるなかでの設計も大変でした。基板の大きさもコネクタのサイズも決まっているとなると、部品の位置も限られ、どのように集積するかという点に悩まされました。そして、技術的なこと以上に短い開発スケジュールで仕上げることも大変でしたね。
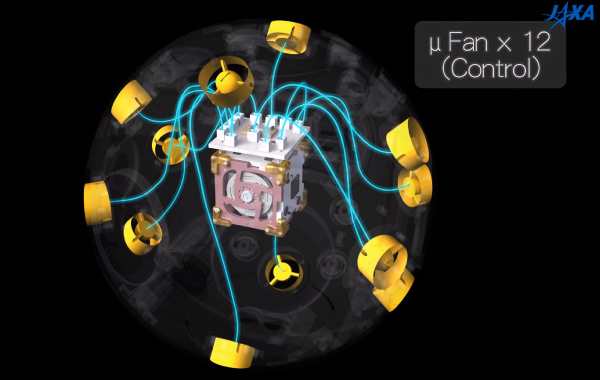
拡張基板に付いたたくさんのコネクタに12台のファンが接続(C)JAXA
ところで、重力のある地球上で「無重力空間での移動」をどうやって実験されたのでしょうか?
谷嶋さん 皆さんがよくご存じのゲームセンターにあるエアホッケーを想像してみてください。エアホッケーは台にある小さな穴から空気を吹き出し、パッドを浮かして摩擦力がゼロの状態を作り出しています。Int-Ballでは、その逆の装置を用意しました。空気を下に押し出すことができる冶具を、すごく平な面に置くと、冶具は空気によって浮いている状態となります。
すると冶具と面との間の摩擦力がゼロ状態となるため、チョンと押したらツーとどこかに行きます。この冶具の上にInt-Ballを置き、重力のある地球上での「無重力空間での移動」を模擬しました。3次元の無重力空間は、実は2次元ではこのような摩擦力ゼロの環境を作ることで代用できます。
横方向に行くときは水平でよいのですが、上の方向に行くような試験をするときは傾けて動かすなど、いろんな状況を作って地上で検証しています。そして実際にISSの中で動作チェックをしてみるということを現在も行っています。

「摩擦力ゼロになると、少し押すだけでツーと進むんです」(谷嶋さん)
本当にさまざまな工夫の賜物ですね。お二人の今後の抱負を教えてください。
茂渡さん 近年爆発的に需要が伸びている小型衛星に向けて、「超小型三軸姿勢制御モジュール」をもっと発展させていきたいと考えています。また、「姿勢制御の基本的な理論の検証に使える」ということでさまざまな大学の先生から興味を示していただいています。民生品への利用、地上での実験用としてもさらに展開できればと思っています。
JAXAのこういった技術は、民間の超小型衛星だけでなく、宇宙以外の全然違う分野に使用される可能性もあります。将来使われるであろう新しいことに取り組むことは非常に楽しいものです。これからも、「研究で社会貢献する」という心を持って開発に取り組んでいきたいです。

国際宇宙ステーションと「きぼう」日本実験棟(C)JAXA/NASA
谷嶋さん 研究開発部門では、「いろんな課題に対して自分のアイデアでどういうふうに解決できるか」と考えて実験して、いい結果を残すことがミッションだと思っています。
Int-Ballのように、実際に自分が開発に携わったものが宇宙に打ち上がって、それが活躍するというのはとても嬉しいことです。まだ自分の作品は少ないのですが、JAXAの宇宙開発分野の革新的な技術が多くの人々に新しい価値を提供すると信じて、これからも研究開発に励んでいきたいと思っています。
「これからも、宇宙のみならず世の中を変えるような研究開発をしていきたいです」(茂渡さん・谷嶋さん)
超小型三軸姿勢制御モジュール~「きぼう」船内ドローン(Int-ball)への応用〜
超小型三軸姿勢制御モジュールはこのようにInt-Ballに応用されました!(JAXA YouTubeより)
お忙しいなか、とても貴重なお話をありがとうございました。